Unique Info About How To Build Biped Robot

Korean Engineers Build 13foot Tall Manned Bipedal Robot Eteknix
How To Robot Biped

Biped Robot 5 Steps Instructables
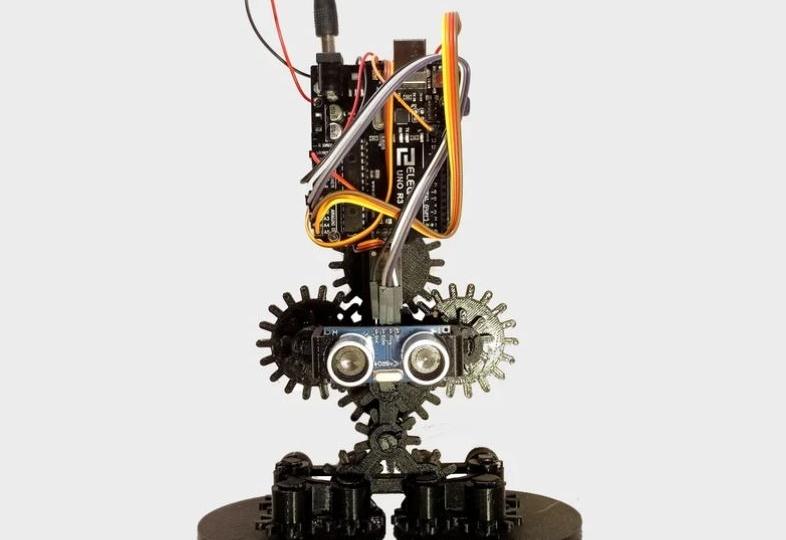
Cogsy A Biped Robot With Only One Motor! Personal Robots
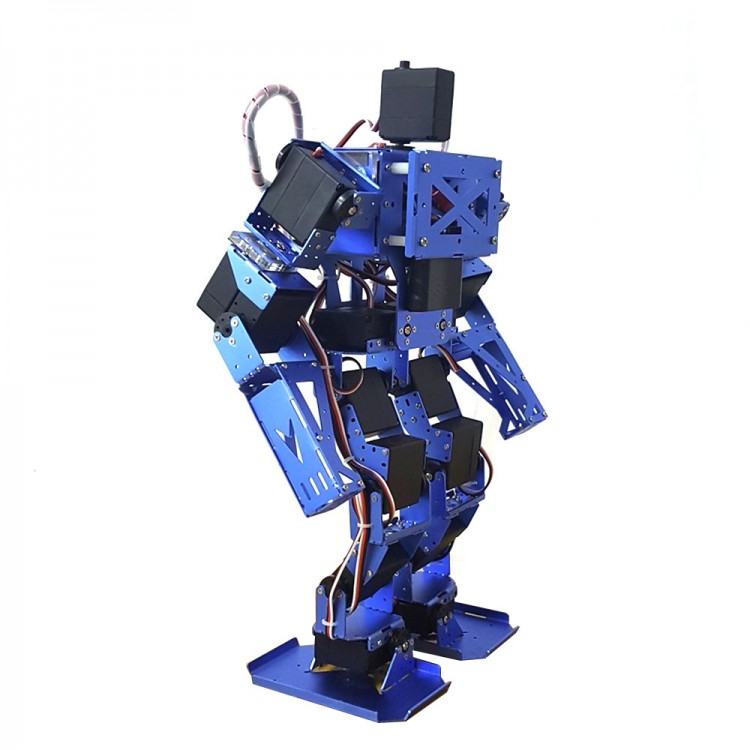
19dof Biped Robot Humanoid Full Kit For Combat Fighting Arduino
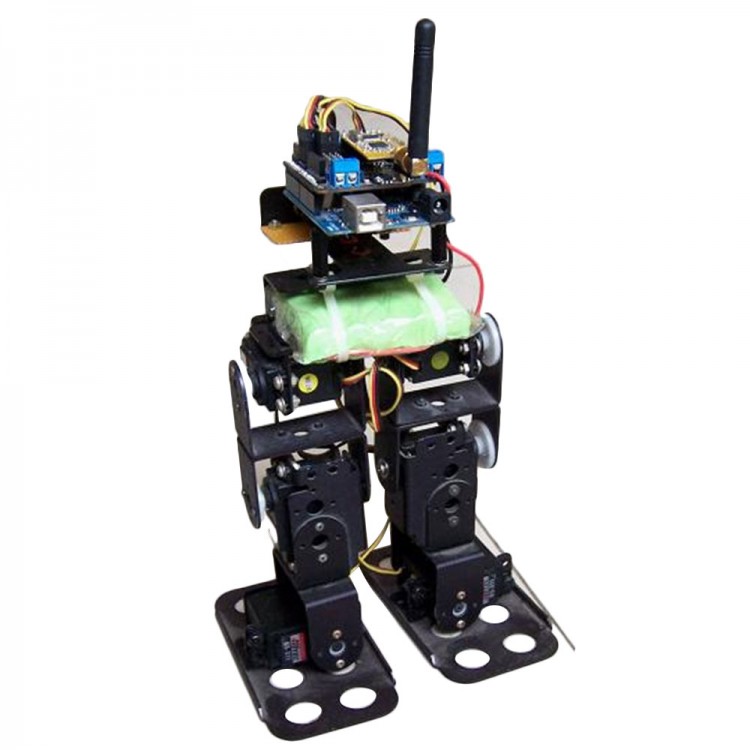
Biped Walking Robot Humanoid Robotics Kit With Df15mg Servo For Diy

This video explains in detail how you can make your own humanoid bipedal robot (a.k.a.
How to build biped robot. 198k views 13 years ago. Key applications of humanoid robots. Wheeled and biped humanoid robots.
The following are the materials required for building this robot: The future of humanoids looks bright. The first step in building your.
The primary purpose of building a humanoid robot is to stand on two feet and mimic the human walking style, which is an extremely challenging task. Build instructions on instructables can be found using the following link: The modular biped robot project is designed to provide a flexible and modular framework for robotics development using python and c++ on the raspberry pi and arduino.
A year ago, and then launched an instructables tutorial to help others to give it a. The ultimate guide to building your own robot wrestler step 1: Welcome to our latest project, an exciting journey where we delve into the world of robotics to construct a small diy biped robot capable of walking and dancing.
The basic misconception is, bipeds are difficult to build.so please remove that from your. And perhaps you wanted to. Best diy biped walking robot to build from your home vasanth vidyakar with regard to robots, in the early days of robots people said, 'oh, let's build a robot'.
I built my own version of spot micro based upon raspberry pi 4 and developed in python 3. [2023] how to make a biped robot: This robot is built entirely by me, without a kit.
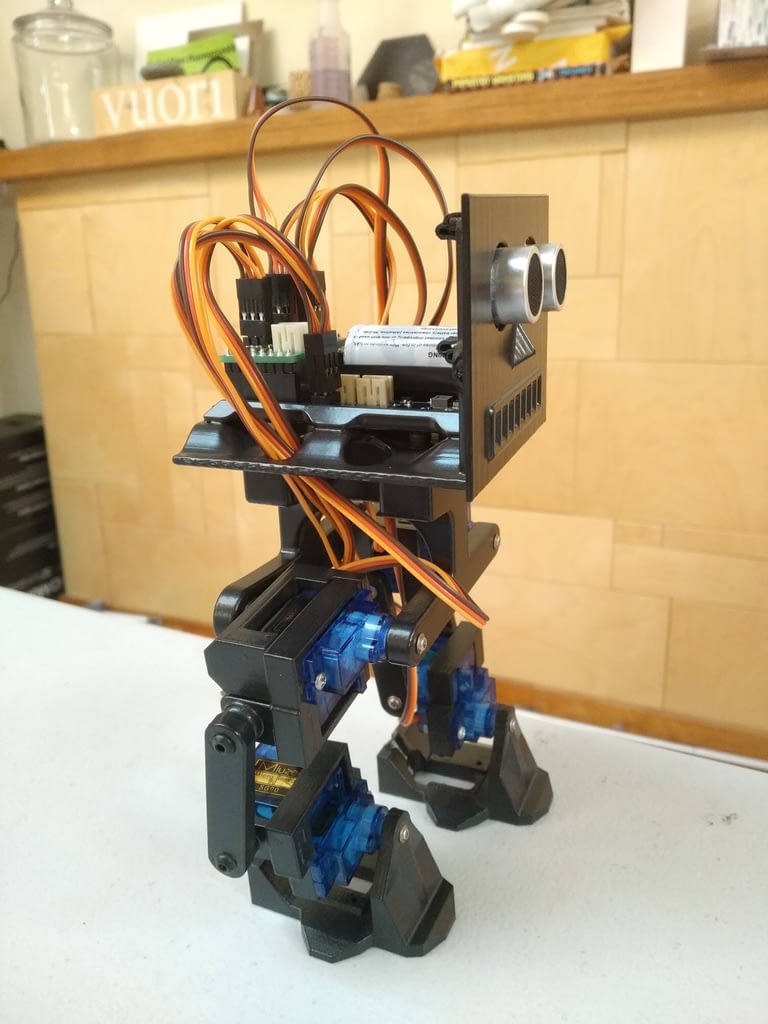
In this video, i demonstrate the arduino controlled robotic biped. If you have no academic. Otto robot) from scratch by using evive and other various components from the humanoid kit.
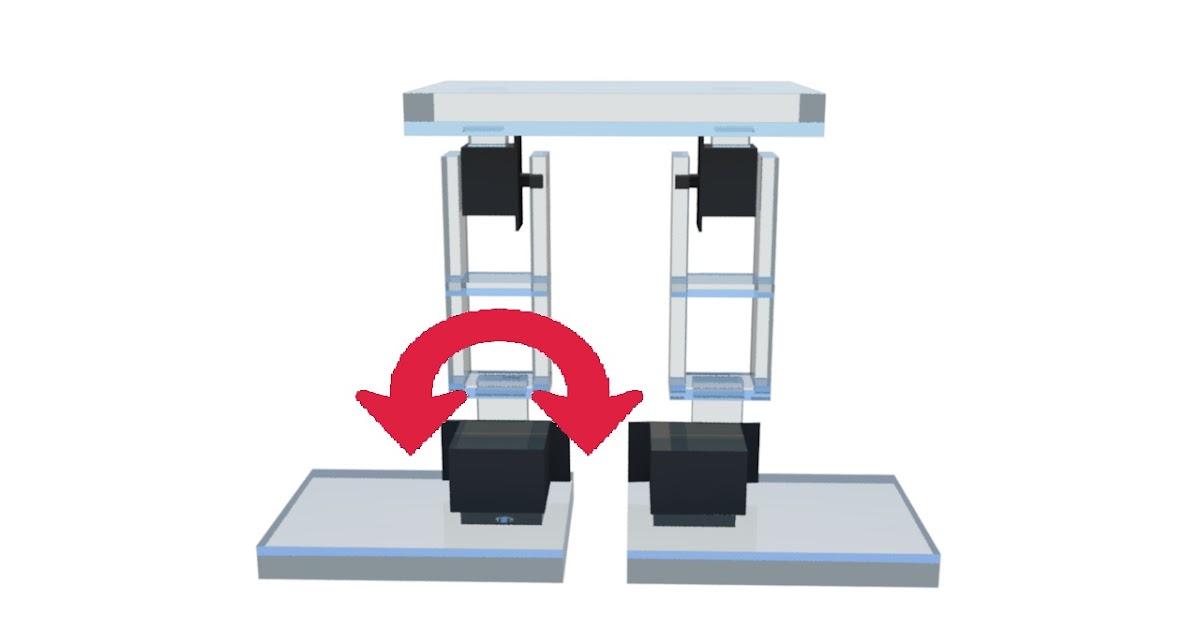
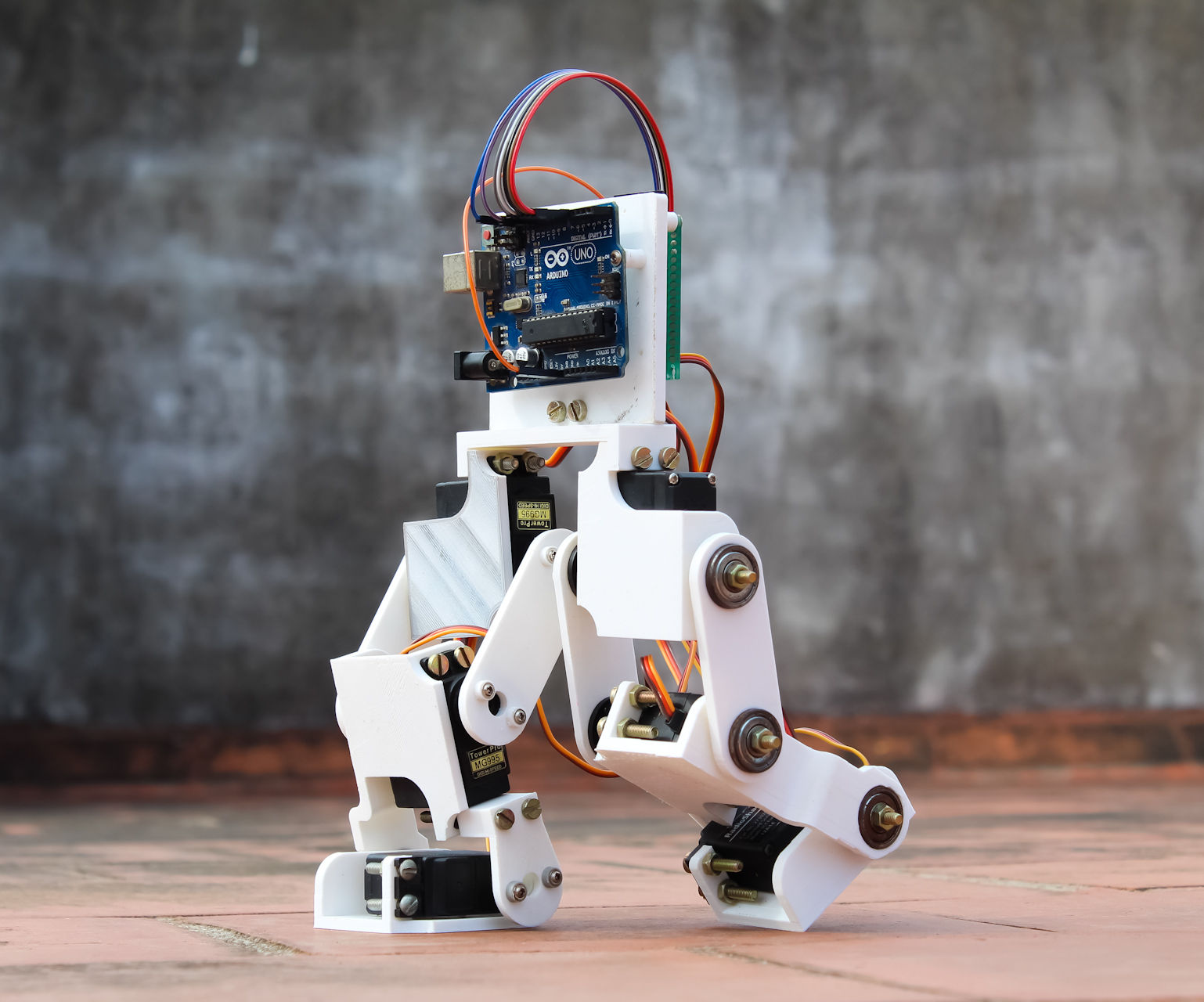
Biped robot step 1: The source code is available on github: A maker has developed a way to use the programmable board arduino to build a walking biped robot that is 3d printed with legs that feature three servos that.
Building humanoid biped robots have always been difficult due to the high number of joints and maintaining stability during walking. Diy autonomous biped robot introduction.

Otto Diy Opensource Biped Robot That You Can Build

Learn & Build Your Own Biped Walking Robot Skyfi Labs Mechatronics

"biped" Game Review Adorable Puzzlesolving Robots

Build Your Original Biped Robot Softarchive
How To Build A Robot (an Overview For Beginners) Humans Robots

How To Make A Walking Robot With Moving Arms 2 Galvanized Wire Biped
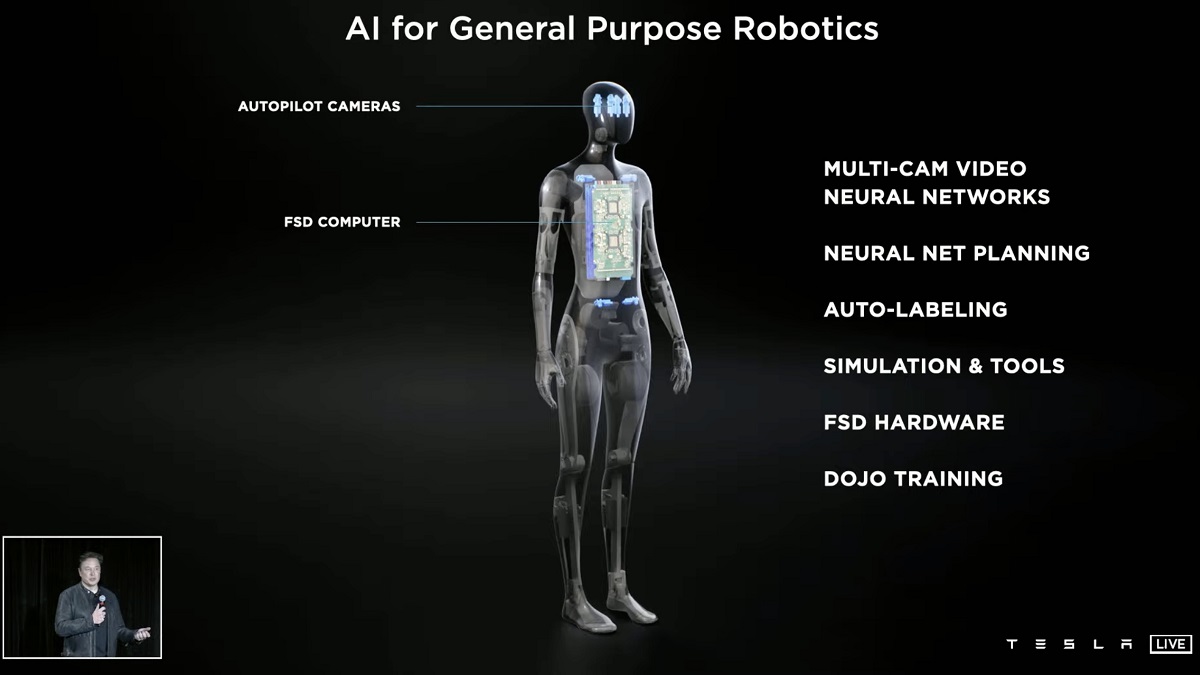
Tesla Bot Humanoid Robot Teased Elon Musk Confirms Plans To Build

17 Dof Biped Robot Humanoid Anthropomorphic Combat Battle Frame
Arduino Controlled Robotic Biped 13 Steps (with Pictures) Instructables

Build Your Own Biped Robot Make

Biped Robot Walks Just Like A Human Being Personal Robots
Easy To Build Biped Walking Robot At Home For Beginners

Agility Robotics Cassie Bipedal Robot Learn Robotics,
